rm_referee::RefereeBase Class Reference
#include <referee_base.h>
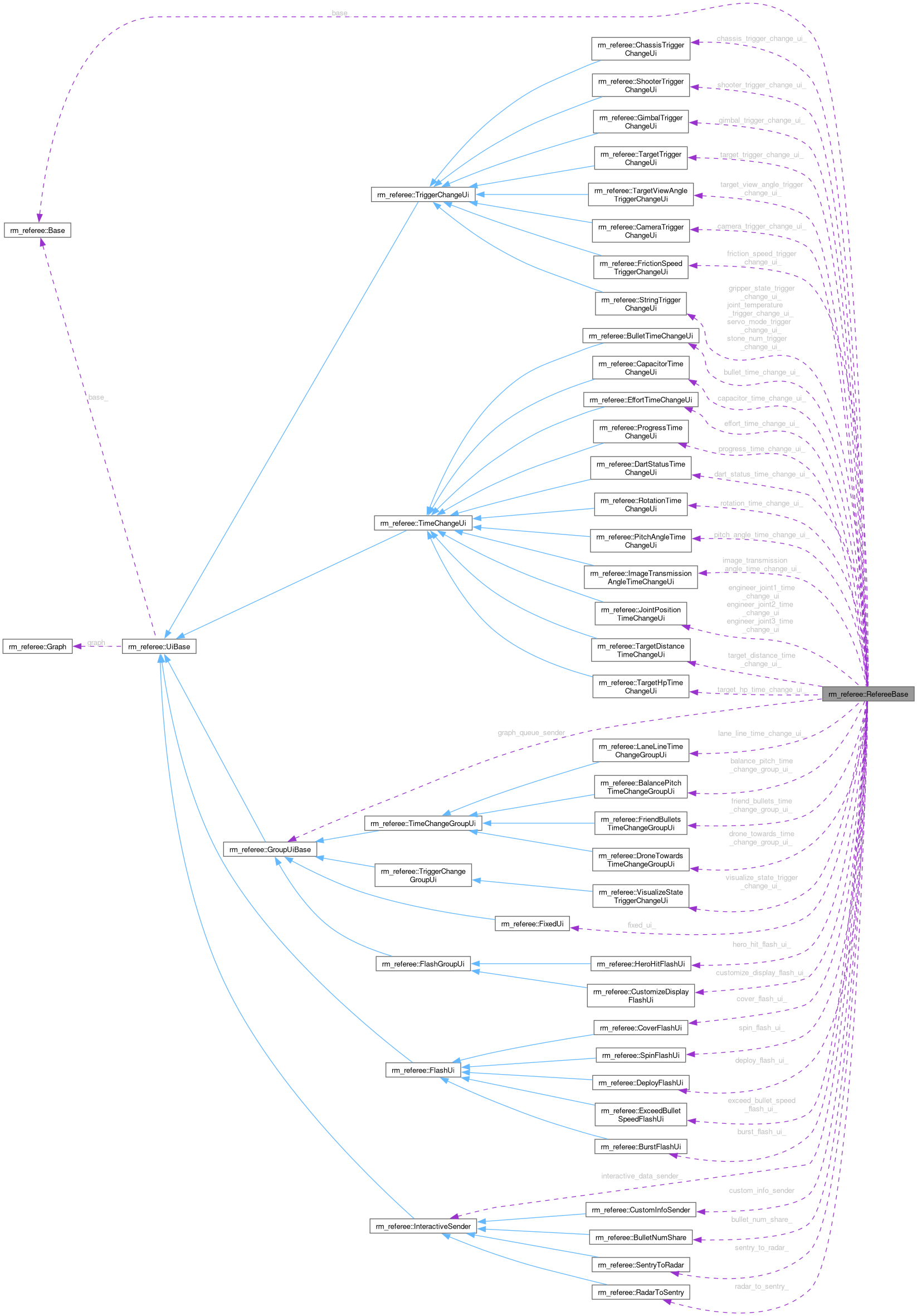
Collaboration diagram for rm_referee::RefereeBase:
Public Member Functions | |
| RefereeBase (ros::NodeHandle &nh, Base &base) | |
| virtual void | addUi () |
| virtual void | robotStatusDataCallBack (const rm_msgs::GameRobotStatus &game_robot_status_data, const ros::Time &last_get_data_time) |
| virtual void | gameStatusDataCallBack (const rm_msgs::GameStatus &game_status_data, const ros::Time &last_get_data_time) |
| virtual void | capacityDataCallBack (const rm_msgs::PowerManagementSampleAndStatusData &data, ros::Time &last_get_data_time) |
| virtual void | powerHeatDataCallBack (const rm_msgs::PowerHeatData &power_heat_data, const ros::Time &last_get_data_time) |
| virtual void | robotHurtDataCallBack (const rm_msgs::RobotHurt &robot_hurt_data, const ros::Time &last_get_data_time) |
| virtual void | bulletRemainDataCallBack (const rm_msgs::BulletAllowance &bullet_allowance, const ros::Time &last_get_data_time) |
| virtual void | interactiveDataCallBack (const rm_referee::InteractiveData &interactive_data, const ros::Time &last_get_data_time) |
| virtual void | eventDataCallBack (const rm_msgs::EventData &event_data, const ros::Time &last_get_data_time) |
| virtual void | updateGameRobotHpDataCallBack (const rm_msgs::GameRobotHp &game_robot_hp_data) |
| virtual void | supplyBulletDataCallBack (const rm_msgs::SupplyProjectileAction &data) |
| virtual void | updateShootDataDataCallBack (const rm_msgs::ShootData &msg) |
| virtual void | updateBulletRemainData (const rm_referee::BulletNumData &data) |
| virtual void | jointStateCallback (const sensor_msgs::JointState::ConstPtr &joint_state) |
| virtual void | actuatorStateCallback (const rm_msgs::ActuatorState::ConstPtr &data) |
| virtual void | dbusDataCallback (const rm_msgs::DbusData::ConstPtr &data) |
| virtual void | chassisCmdDataCallback (const rm_msgs::ChassisCmd::ConstPtr &data) |
| virtual void | vel2DCmdDataCallback (const geometry_msgs::Twist::ConstPtr &data) |
| virtual void | shootStateCallback (const rm_msgs::ShootState::ConstPtr &data) |
| virtual void | gimbalCmdDataCallback (const rm_msgs::GimbalCmd::ConstPtr &data) |
| virtual void | cardCmdDataCallback (const rm_msgs::StateCmd::ConstPtr &data) |
| virtual void | engineerUiDataCallback (const rm_msgs::EngineerUi::ConstPtr &data) |
| virtual void | manualDataCallBack (const rm_msgs::ManualToReferee::ConstPtr &data) |
| virtual void | radarDataCallBack (const std_msgs::Int8MultiArrayConstPtr &data) |
| virtual void | cameraNameCallBack (const std_msgs::StringConstPtr &data) |
| virtual void | trackCallBack (const rm_msgs::TrackDataConstPtr &data) |
| virtual void | balanceStateCallback (const rm_msgs::BalanceStateConstPtr &data) |
| virtual void | radarReceiveCallback (const rm_msgs::ClientMapReceiveData::ConstPtr &data) |
| virtual void | mapSentryCallback (const rm_msgs::MapSentryDataConstPtr &data) |
| virtual void | sentryAttackingTargetCallback (const rm_msgs::SentryAttackingTargetConstPtr &data) |
| virtual void | sendSentryCmdCallback (const rm_msgs::SentryCmdConstPtr &data) |
| virtual void | sendRadarCmdCallback (const rm_msgs::RadarInfoConstPtr &data) |
| virtual void | sendCustomInfoCallback (const std_msgs::StringConstPtr &data) |
| virtual void | dronePoseCallBack (const geometry_msgs::PoseStampedConstPtr &data) |
| virtual void | shootCmdCallBack (const rm_msgs::ShootCmdConstPtr &data) |
| virtual void | radarToRefereeCallBack (const rm_msgs::RadarToSentryConstPtr &data) |
| virtual void | customizeDisplayCmdCallBack (const std_msgs::UInt32ConstPtr &data) |
| virtual void | visualizeStateDataCallBack (const rm_msgs::VisualizeStateDataConstPtr &data) |
| void | sendSerialDataCallback () |
| void | sendQueue () |
Constructor & Destructor Documentation
◆ RefereeBase()
|
explicit |
Member Function Documentation
◆ actuatorStateCallback()
|
virtual |
◆ addUi()
|
virtual |
◆ balanceStateCallback()
|
virtual |
◆ bulletRemainDataCallBack()
|
virtual |
◆ cameraNameCallBack()
|
virtual |
◆ capacityDataCallBack()
|
virtual |
◆ cardCmdDataCallback()
|
virtual |
◆ chassisCmdDataCallback()
|
virtual |
◆ customizeDisplayCmdCallBack()
|
virtual |
◆ dbusDataCallback()
|
virtual |
◆ dronePoseCallBack()
|
virtual |
◆ engineerUiDataCallback()
|
virtual |
◆ eventDataCallBack()
|
virtual |
◆ gameStatusDataCallBack()
|
virtual |
◆ gimbalCmdDataCallback()
|
virtual |
◆ interactiveDataCallBack()
|
virtual |
◆ jointStateCallback()
|
virtual |
◆ manualDataCallBack()
|
virtual |
◆ mapSentryCallback()
|
virtual |
◆ powerHeatDataCallBack()
|
virtual |
◆ radarDataCallBack()
|
virtual |
◆ radarReceiveCallback()
|
virtual |
◆ radarToRefereeCallBack()
|
virtual |
◆ robotHurtDataCallBack()
|
virtual |
◆ robotStatusDataCallBack()
|
virtual |
◆ sendCustomInfoCallback()
|
virtual |
◆ sendQueue()
| void rm_referee::RefereeBase::sendQueue | ( | ) |
◆ sendRadarCmdCallback()
|
virtual |
◆ sendSentryCmdCallback()
|
virtual |
◆ sendSerialDataCallback()
| void rm_referee::RefereeBase::sendSerialDataCallback | ( | ) |
◆ sentryAttackingTargetCallback()
|
virtual |
◆ shootCmdCallBack()
|
virtual |
◆ shootStateCallback()
|
virtual |
◆ supplyBulletDataCallBack()
|
virtual |
◆ trackCallBack()
|
virtual |
◆ updateBulletRemainData()
|
virtual |
◆ updateGameRobotHpDataCallBack()
|
virtual |
◆ updateShootDataDataCallBack()
|
virtual |
◆ vel2DCmdDataCallback()
|
virtual |
◆ visualizeStateDataCallBack()
|
virtual |
Member Data Documentation
◆ actuator_state_sub_
| ros::Subscriber rm_referee::RefereeBase::actuator_state_sub_ |
◆ add_ui_flag_
| bool rm_referee::RefereeBase::add_ui_flag_ = false |
◆ add_ui_frequency_
| int rm_referee::RefereeBase::add_ui_frequency_ |
◆ add_ui_max_times_
| int rm_referee::RefereeBase::add_ui_max_times_ |
◆ add_ui_timer_
| ros::Timer rm_referee::RefereeBase::add_ui_timer_ |
◆ add_ui_times_
| int rm_referee::RefereeBase::add_ui_times_ |
◆ balance_pitch_time_change_group_ui_
| BalancePitchTimeChangeGroupUi* rm_referee::RefereeBase::balance_pitch_time_change_group_ui_ {} |
◆ balance_state_sub_
| ros::Subscriber rm_referee::RefereeBase::balance_state_sub_ |
◆ base_
| Base& rm_referee::RefereeBase::base_ |
◆ bullet_num_share_
| BulletNumShare* rm_referee::RefereeBase::bullet_num_share_ {} |
◆ bullet_time_change_ui_
| BulletTimeChangeUi* rm_referee::RefereeBase::bullet_time_change_ui_ {} |
◆ burst_flash_ui_
| BurstFlashUi* rm_referee::RefereeBase::burst_flash_ui_ {} |
◆ calibration_status_sub_
| ros::Subscriber rm_referee::RefereeBase::calibration_status_sub_ |
◆ camera_name_sub_
| ros::Subscriber rm_referee::RefereeBase::camera_name_sub_ |
◆ camera_trigger_change_ui_
| CameraTriggerChangeUi* rm_referee::RefereeBase::camera_trigger_change_ui_ {} |
◆ capacitor_time_change_ui_
| CapacitorTimeChangeUi* rm_referee::RefereeBase::capacitor_time_change_ui_ {} |
◆ card_cmd_sub_
| ros::Subscriber rm_referee::RefereeBase::card_cmd_sub_ |
◆ character_queue_
| std::deque<Graph> rm_referee::RefereeBase::character_queue_ |
◆ chassis_cmd_sub_
| ros::Subscriber rm_referee::RefereeBase::chassis_cmd_sub_ |
◆ chassis_trigger_change_ui_
| ChassisTriggerChangeUi* rm_referee::RefereeBase::chassis_trigger_change_ui_ {} |
◆ cover_flash_ui_
| CoverFlashUi* rm_referee::RefereeBase::cover_flash_ui_ {} |
◆ custom_info_sender
| CustomInfoSender* rm_referee::RefereeBase::custom_info_sender {} |
◆ customize_display_cmd_sub_
| ros::Subscriber rm_referee::RefereeBase::customize_display_cmd_sub_ |
◆ customize_display_flash_ui_
| CustomizeDisplayFlashUi* rm_referee::RefereeBase::customize_display_flash_ui_ {} |
◆ dart_status_time_change_ui_
| DartStatusTimeChangeUi* rm_referee::RefereeBase::dart_status_time_change_ui_ {} |
◆ dbus_sub_
| ros::Subscriber rm_referee::RefereeBase::dbus_sub_ |
◆ dbus_topic_
| std::string rm_referee::RefereeBase::dbus_topic_ |
◆ deploy_flash_ui_
| DeployFlashUi* rm_referee::RefereeBase::deploy_flash_ui_ {} |
◆ detection_status_sub_
| ros::Subscriber rm_referee::RefereeBase::detection_status_sub_ |
◆ drone_pose_sub_
| ros::Subscriber rm_referee::RefereeBase::drone_pose_sub_ |
◆ drone_towards_time_change_group_ui_
| DroneTowardsTimeChangeGroupUi* rm_referee::RefereeBase::drone_towards_time_change_group_ui_ {} |
◆ effort_time_change_ui_
| EffortTimeChangeUi* rm_referee::RefereeBase::effort_time_change_ui_ {} |
◆ engineer_cmd_sub_
| ros::Subscriber rm_referee::RefereeBase::engineer_cmd_sub_ |
◆ engineer_joint1_time_change_ui
| JointPositionTimeChangeUi* rm_referee::RefereeBase::engineer_joint1_time_change_ui {} |
◆ engineer_joint2_time_change_ui
| JointPositionTimeChangeUi * rm_referee::RefereeBase::engineer_joint2_time_change_ui {} |
◆ engineer_joint3_time_change_ui
| JointPositionTimeChangeUi * rm_referee::RefereeBase::engineer_joint3_time_change_ui {} |
◆ exceed_bullet_speed_flash_ui_
| ExceedBulletSpeedFlashUi* rm_referee::RefereeBase::exceed_bullet_speed_flash_ui_ {} |
◆ fixed_ui_
| FixedUi* rm_referee::RefereeBase::fixed_ui_ {} |
◆ friction_speed_trigger_change_ui_
| FrictionSpeedTriggerChangeUi* rm_referee::RefereeBase::friction_speed_trigger_change_ui_ {} |
◆ friend_bullets_time_change_group_ui_
| FriendBulletsTimeChangeGroupUi* rm_referee::RefereeBase::friend_bullets_time_change_group_ui_ {} |
◆ gimbal_cmd_sub_
| ros::Subscriber rm_referee::RefereeBase::gimbal_cmd_sub_ |
◆ gimbal_trigger_change_ui_
| GimbalTriggerChangeUi* rm_referee::RefereeBase::gimbal_trigger_change_ui_ {} |
◆ graph_queue_
| std::deque<Graph> rm_referee::RefereeBase::graph_queue_ |
◆ graph_queue_sender_
| GroupUiBase* rm_referee::RefereeBase::graph_queue_sender_ {} |
◆ gripper_state_trigger_change_ui_
| StringTriggerChangeUi * rm_referee::RefereeBase::gripper_state_trigger_change_ui_ {} |
◆ hero_hit_flash_ui_
| HeroHitFlashUi* rm_referee::RefereeBase::hero_hit_flash_ui_ {} |
◆ image_transmission_angle_time_change_ui_
| ImageTransmissionAngleTimeChangeUi* rm_referee::RefereeBase::image_transmission_angle_time_change_ui_ {} |
◆ interactive_data_sender_
| InteractiveSender* rm_referee::RefereeBase::interactive_data_sender_ {} |
◆ is_adding_
| bool rm_referee::RefereeBase::is_adding_ = false |
◆ joint_state_sub_
| ros::Subscriber rm_referee::RefereeBase::joint_state_sub_ |
◆ joint_temperature_trigger_change_ui_
| StringTriggerChangeUi * rm_referee::RefereeBase::joint_temperature_trigger_change_ui_ {} |
◆ lane_line_time_change_ui_
| LaneLineTimeChangeGroupUi* rm_referee::RefereeBase::lane_line_time_change_ui_ {} |
◆ manual_data_sub_
| ros::Subscriber rm_referee::RefereeBase::manual_data_sub_ |
◆ map_sentry_sub_
| ros::Subscriber rm_referee::RefereeBase::map_sentry_sub_ |
◆ nh_
| ros::NodeHandle rm_referee::RefereeBase::nh_ |
◆ pitch_angle_time_change_ui_
| PitchAngleTimeChangeUi* rm_referee::RefereeBase::pitch_angle_time_change_ui_ {} |
◆ progress_time_change_ui_
| ProgressTimeChangeUi* rm_referee::RefereeBase::progress_time_change_ui_ {} |
◆ radar_cmd_data_last_send_
| ros::Time rm_referee::RefereeBase::radar_cmd_data_last_send_ |
◆ radar_cmd_sub_
| ros::Subscriber rm_referee::RefereeBase::radar_cmd_sub_ |
◆ radar_date_sub_
| ros::Subscriber rm_referee::RefereeBase::radar_date_sub_ |
◆ radar_interactive_data_last_send_
| ros::Time rm_referee::RefereeBase::radar_interactive_data_last_send_ |
◆ radar_receive_sub_
| ros::Subscriber rm_referee::RefereeBase::radar_receive_sub_ |
◆ radar_to_referee_sub_
| ros::Subscriber rm_referee::RefereeBase::radar_to_referee_sub_ |
◆ radar_to_sentry_
| RadarToSentry* rm_referee::RefereeBase::radar_to_sentry_ {} |
◆ rotation_time_change_ui_
| RotationTimeChangeUi* rm_referee::RefereeBase::rotation_time_change_ui_ {} |
◆ send_serial_data_timer_
| ros::Timer rm_referee::RefereeBase::send_serial_data_timer_ |
◆ send_ui_queue_delay_
| double rm_referee::RefereeBase::send_ui_queue_delay_ |
◆ sentry_cmd_data_last_send_
| ros::Time rm_referee::RefereeBase::sentry_cmd_data_last_send_ |
◆ sentry_cmd_sub_
| ros::Subscriber rm_referee::RefereeBase::sentry_cmd_sub_ |
◆ sentry_interactive_data_last_send_
| ros::Time rm_referee::RefereeBase::sentry_interactive_data_last_send_ |
◆ sentry_state_sub_
| ros::Subscriber rm_referee::RefereeBase::sentry_state_sub_ |
◆ sentry_to_radar_
| SentryToRadar* rm_referee::RefereeBase::sentry_to_radar_ {} |
◆ sentry_to_referee_sub_
| ros::Subscriber rm_referee::RefereeBase::sentry_to_referee_sub_ |
◆ servo_mode_trigger_change_ui_
| StringTriggerChangeUi* rm_referee::RefereeBase::servo_mode_trigger_change_ui_ {} |
◆ shoot_cmd_sub_
| ros::Subscriber rm_referee::RefereeBase::shoot_cmd_sub_ |
◆ shoot_state_sub_
| ros::Subscriber rm_referee::RefereeBase::shoot_state_sub_ |
◆ shooter_trigger_change_ui_
| ShooterTriggerChangeUi* rm_referee::RefereeBase::shooter_trigger_change_ui_ {} |
◆ spin_flash_ui_
| SpinFlashUi* rm_referee::RefereeBase::spin_flash_ui_ {} |
◆ stone_num_trigger_change_ui_
| StringTriggerChangeUi * rm_referee::RefereeBase::stone_num_trigger_change_ui_ {} |
◆ target_distance_time_change_ui_
| TargetDistanceTimeChangeUi* rm_referee::RefereeBase::target_distance_time_change_ui_ {} |
◆ target_hp_time_change_ui_
| TargetHpTimeChangeUi* rm_referee::RefereeBase::target_hp_time_change_ui_ {} |
◆ target_trigger_change_ui_
| TargetTriggerChangeUi* rm_referee::RefereeBase::target_trigger_change_ui_ {} |
◆ target_view_angle_trigger_change_ui_
| TargetViewAngleTriggerChangeUi* rm_referee::RefereeBase::target_view_angle_trigger_change_ui_ {} |
◆ track_sub_
| ros::Subscriber rm_referee::RefereeBase::track_sub_ |
◆ vel2D_cmd_sub_
| ros::Subscriber rm_referee::RefereeBase::vel2D_cmd_sub_ |
◆ visualize_state_data_sub_
| ros::Subscriber rm_referee::RefereeBase::visualize_state_data_sub_ |
◆ visualize_state_trigger_change_ui_
| VisualizeStateTriggerChangeUi* rm_referee::RefereeBase::visualize_state_trigger_change_ui_ {} |
The documentation for this class was generated from the following files:
- rm_referee/include/rm_referee/referee_base.h
- rm_referee/src/referee_base.cpp
Generated by